Robot Race
Time Limit: 10 Seconds Memory Limit: 131072 KB
The International competition of Robot Race 2014 will be held in Tehran. In
the competition, a path is specified
by the scientific committee, and each robot has to move along the path, from the beginning
to the end.
There is an electronic charge station (ECS) on the path, at which robots charge their batteries. Every robot have a device which tells its distance
to the ECS. Unfortunately, the devices are not good enough, so, each de- vice
shows the Euclidean distance of the robot to the ECS, not the remaining
distance on the path to the ECS.
Kamran is a member of the scientific committee of the competition. He
knows that there is a common bug in the control software
of some robots. A buggy robot imagines that its device
shows the remaining
distance on the path
to the ECS, not the the Euclidean distance
to the ECS. As a consequence,
from the buggy-robot point of view, its device must show a decreasing se- quence of numbers before reaching to the ECS. If this is not the case, the
buggy robot crashes since it thinks that it has already passed
the ECS without
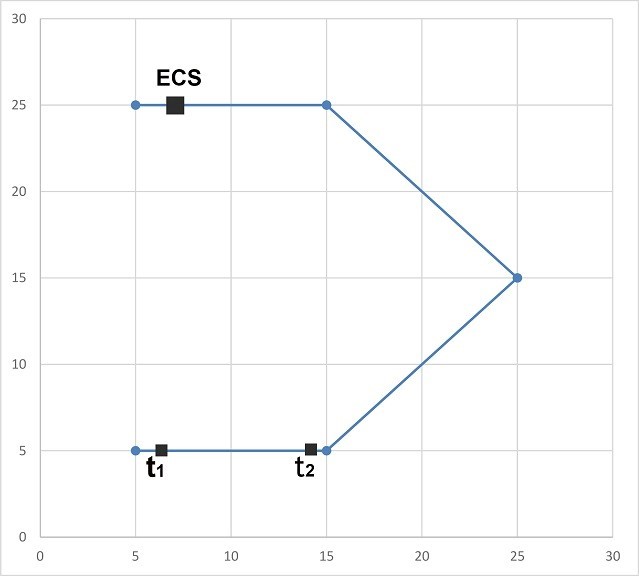
getting charged. Kamran considers a given competition path as unfair, if he can choose a position for ECS on the path such that the buggy
robots crash in some time. In
other words, a path is unfair if an ECS position can be chosen and there exist three times t1 <
t2 <
t3 such that a
robot is at ECS at time t3 and |pt1 pt3 | < |pt2 pt3 | where |ab| denotes the Euclidean distanceb between a and b and
pt is the position
of the robot at time t. The scientific committee has proposed a list
of possible paths for the competition, and Kamran wants to know which path is fair (i.e, the path is not unfair).
Input
There
are multiple test cases in the input. The first line of each test case contains
a positive integer n (n ⩽ 10, 000), which is the number
of points on the path. The next n lines
contain n pair
of integers x and y (−106 ⩽ x, y ⩽ 106 ). The i-th
pair specifies the coordinate of the i-point
in the path. Robots have to start from the first point, and pass through the
segments joining consecutive points each after other, and stop when they reach
the last point. It is guaranteed that the path does not intersect itself. The
input terminates with a line containing 0 which
should not be processed.
Output
For each test case,
output a line containing either Fair or
Unfair depending on whether the given path is fair or unfair,
respectively.
Sample Input
5 5 5 15 5 25 15 15 25 5 25 4 0 0 1 0 2 1 3 0 0
Sample Output
Unfair FairSubmit
Source: Tehran, Asia Region - Regional 2014